| img | ||
| Progetto.nlogo | ||
| README.md | ||
1-base
Descrizione
Il progetto complessivo consiste in una serie di realizzazioni di un modello multiagente e di esperimenti su di esso; ogni nuova versione del modello è più raffinata della precedente. La versione iniziale non è un sistema collettivo; la versione finale realizza un sistema collettivo i cui elementi sono capaci di evolvere e di adattarsi all’ambiente.
Ambiente
L’ambiente è un toroide composto da 150x150 patch.
Dopo il setup dell'ambiente, una percentuale configurabile di patch conterrà cibo (gialle), mentre le restanti saranno vuote (nere).
Termiti
Dopo il setup, nell'ambiente saranno presenti un numero configurabile di termiti.
Le termiti normalmente sono bianche, ma diventano arancioni quando trasportano cibo.
Esse (una alla volta, in ordine casuale) effettueranno ad ogni tick le seguenti azioni:
- Ricerca: la termite vaga per l'ambiente fino a quando non incontra un pezzo di cibo, che raccoglie, per poi allontanarsi dalla sua posizione attuale.
- Vaga: la termite ruota di un angolo configurabile di gradi, poi avanza di un passo.
- Raccoglie: la termite rimuove il cibo dalla patch in cui si trova e inizia a trasportarlo, cambiando colore.
- Allontana: la termite si gira in una direzione casuale, ed effettua un numero configurabile di passi in avanti detto
rg_inerzia.
- Deposito: la termite vaga per l'ambiente fino a quando non trova un posto dove depositare il cibo, lo deposita e poi si allontana dalla sua posizione attuale.
- Vaga: la termite ruota di un angolo configurabile di gradi, poi avanza di un passo.
- Deposita: la termite inserisce il cibo nella patch in cui si trova, e smette di trasportarlo, tornando al suo colore originale.
- Allontana: la termite si gira in una direzione casuale, ed effettua un numero configurabile di passi in avanti detto
rg_libera.
Dinamica del sistema
Le termiti spostano ad ogni tick un pezzo di cibo da una patch a un'altra, che si trova ad una certa distanza dalla prima, effettuando una unità di lavoro.
Così facendo, le termiti raccolgono il cibo in magazzini progressivamente sempre più compatti e vicini tra loro, che lentamente si uniscono fino a formare un unico magazzino comprendente tutto il cibo dell'ambiente.
Feedback del sistema
Nel sistema si possono notare due principali feedback:
- Positivo: Più grande è un magazzino, più probabilità una termite avrà di capitarci sopra ed appoggiare lì il proprio cibo, portandolo a ingrandirsi nel tempo.
- Negativo: Meno grande è un magazzino, meno probabilità una termite avrà di capitarci sopra ed appoggiare lì il proprio cibo, portandolo a ridursi nel tempo.
Esperimenti
Tutti gli esperimenti sottostanti sono stati eseguiti con i parametri di default qui elencati:
densita_materiale: 20numero_termiti: 100rg_inerzia: 20rg_libera: 20angolo_virata: 100
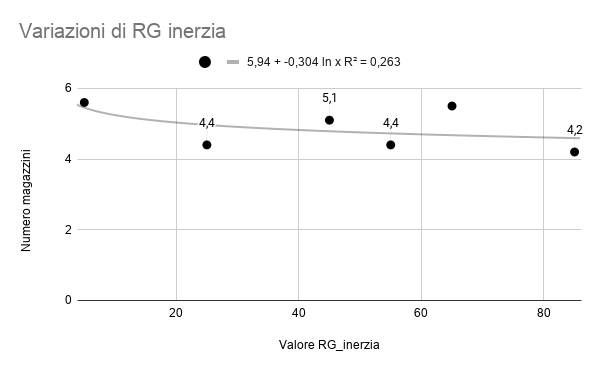
Esperimento 1: Variazioni al valore di rg_inerzia
Si sono misurati i magazzini formatosi dopo 1000 tick al variare del parametro rg_inerzia.
Dai dati sperimentali emerge che il parametro non influenza particolarmente il numero di magazzini; eventuali variazioni sono da ricondursi alla casualità dello stato iniziale di questo modello.
Tentativi di interpolazione non hanno fornito nessun risultato con i dati raccolti: il best fit è stato con la curva logaritmica, avente un misero R^2 = 0.263.
Dati sperimentali
rg_inerzia |
Run 1 | Run 2 | Run 3 | Run 4 | Run 5 | Run 6 | Run 7 | Run 8 | Run 9 | Run 10 | Media |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 5 | 4 | 6 | 6 | 6 | 7 | 6 | 6 | 6 | 4 | 5 | 5.6 |
| 25 | 4 | 5 | 4 | 5 | 4 | 5 | 5 | 4 | 4 | 4 | 4.4 |
| 45 | 6 | 4 | 2 | 5 | 4 | 7 | 6 | 7 | 4 | 6 | 5.1 |
| 55 | 4 | 5 | 4 | 5 | 3 | 5 | 4 | 4 | 4 | 6 | 4.4 |
| 65 | 5 | 5 | 5 | 7 | 6 | 6 | 5 | 5 | 5 | 6 | 5.5 |
| 85 | 4 | 4 | 4 | 4 | 6 | 5 | 5 | 3 | 4 | 3 | 4.2 |
Grafico
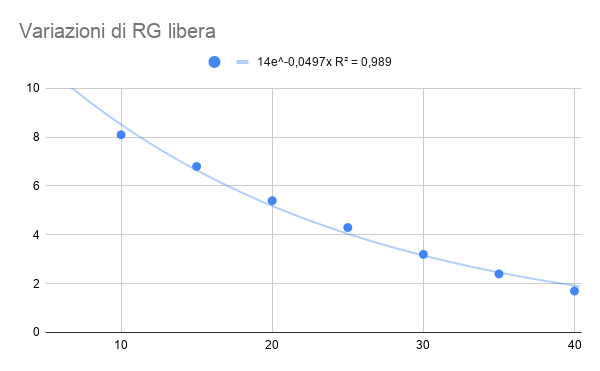
Esperimento 2: Variazioni al valore di rg_libera
Si sono misurati i magazzini formatosi dopo 1000 tick al variare del parametro rg_libera.
Dai dati sperimentali emerge che il valore del parametro rg_libera è inversamente proporzionale al numero di magazzini creatosi dopo 1000 tick.
Probabilmente l'andamento è esponenziale: con il parametro impostato a 5 i magazzini sono ancora talmente tanti da risultare incalcolabili, ma aumentarla anche solo a 10 e li rende un numero definito.
Interpolando con una curva esponenziale, si è ottenuto un R^2 = 0.989.
Dati sperimentali
rg_libera |
Run 1 | Run 2 | Run 3 | Run 4 | Run 5 | Run 6 | Run 7 | Run 8 | Run 9 | Run 10 | Media |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 5 | N/D | N/D | N/D | N/D | N/D | N/D | N/D | N/D | N/D | N/D | N/D |
| 10 | 7 | 9 | 9 | 7 | 9 | 7 | 8 | 9 | 8 | 8 | 8.1 |
| 15 | 7 | 6 | 7 | 7 | 6 | 7 | 6 | 8 | 7 | 7 | 6.8 |
| 20 | 5 | 5 | 6 | 5 | 5 | 7 | 6 | 6 | 4 | 5 | 5.4 |
| 25 | 4 | 5 | 4 | 4 | 5 | 4 | 4 | 4 | 4 | 5 | 4.3 |
| 30 | 4 | 3 | 3 | 3 | 3 | 2 | 3 | 4 | 4 | 3 | 3.2 |
| 35 | 3 | 2 | 2 | 2 | 2 | 2 | 3 | 3 | 2 | 3 | 2.4 |
| 40 | 1 | 2 | 1 | 2 | 1 | 2 | 2 | 3 | 2 | 1 | 1.7 |
Grafico
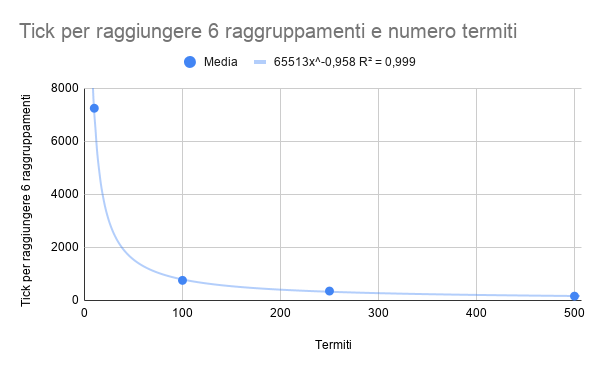
Esperimento 3: Variazioni al numero di termiti nel sistema
Si è misurato il tempo necessario perchè quantità le termiti formassero 6 raggruppamenti di cibo al variare delle quantità di termiti.
Si è ipotizzato che formare 6 raggruppamenti richieda un numero di unità di lavoro costante (dipendente dalla disposizione iniziale del cibo).
Effettuando gli esperimenti, si è verificata questa ipotesi: si è notata una dipendenza inversa tra il numero di tick richiesti e il numero di termiti presenti nel modello secondo la formula termiti * tick_richiesti = costante
Si è riusciti a determinare il valore della costante (con un margine di errore): esso è ~79875 unità di lavoro.
Dati sperimentali
| Termiti | Run 1 | Run 2 | Run 3 | Run 4 | Run 5 | Run 6 | Run 7 | Run 8 | Run 9 | Run 10 | Media tick | Media unità di lavoro |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 10 | 7000 | 6000 | 6000 | 7500 | 6000 | 8000 | 9000 | 10000 | 6000 | 7000 | 7250 | 72500 |
| 100 | 700 | 800 | 800 | 700 | 900 | 800 | 900 | 600 | 700 | 700 | 760 | 76000 |
| 250 | 320 | 440 | 360 | 400 | 320 | 440 | 360 | 360 | 240 | 320 | 356 | 89000 |
| 500 | 180 | 160 | 120 | 120 | 180 | 200 | 160 | 240 | 160 | 120 | 164 | 82000 |
| Media | 79875 |
Grafico
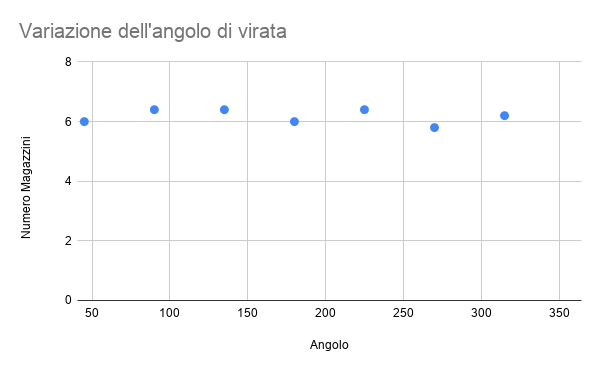
Esperimento 4: Variazioni al valore angolo_virata
Si sono misurati i magazzini formatosi dopo 1000 tick al variare del parametro angolo_virata.
Dai dati sperimentali si nota che la variazione del numero dei magazzini è pressochè nulla; si può quindi dire che la variazione dell'angolo di virata non influenza il numero magazzini creati dalle termiti.
Dati sperimentali
angolo_virata |
Run 1 | Run 2 | Run 3 | Run 4 | Run 5 | Valore medio magazzini |
|---|---|---|---|---|---|---|
| 45 | 5 | 6 | 5 | 6 | 5 | 5.4 |
| 90 | 5 | 6 | 6 | 7 | 6 | 6.0 |
| 135 | 6 | 7 | 5 | 6 | 8 | 6.4 |
| 180 | 7 | 7 | 6 | 6 | 6 | 6.4 |
| 225 | 5 | 5 | 6 | 7 | 7 | 6.0 |
| 270 | 6 | 6 | 6 | 7 | 7 | 6.4 |
| 315 | 5 | 6 | 6 | 7 | 5 | 5.8 |
| 360 | 6 | 7 | 6 | 6 | 6 | 6.2 |
Grafico
Branches
Sono disponibili vari branch con variazioni a questo progetto: